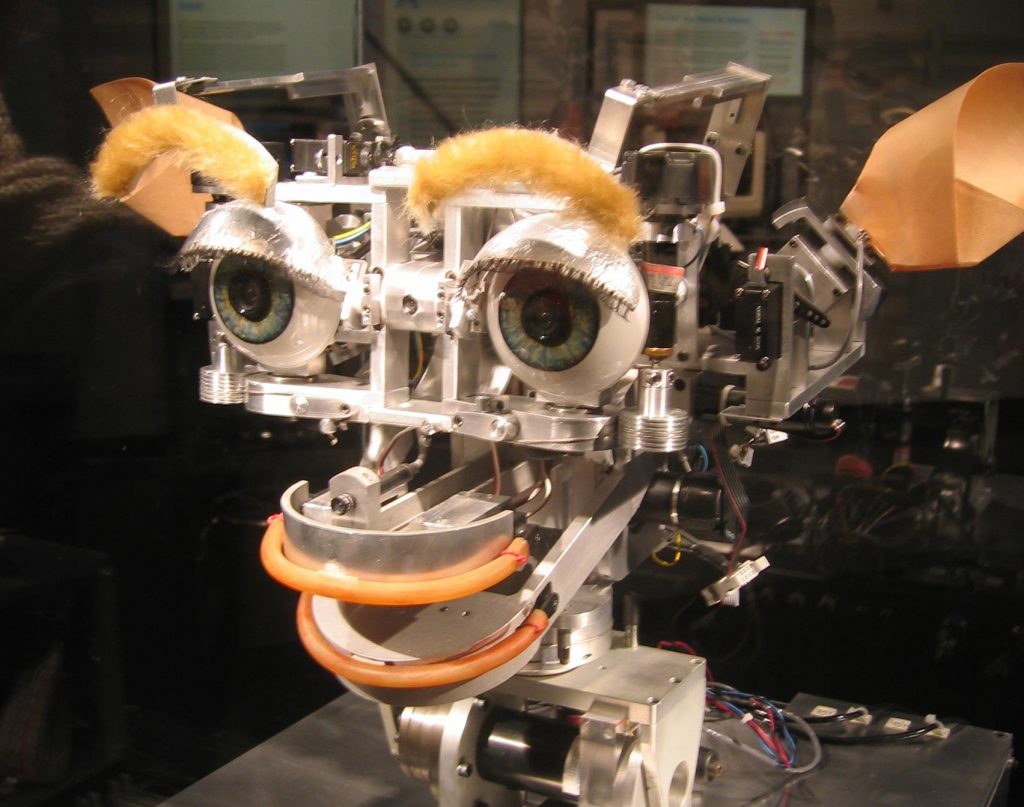
An in-depth look at “Sam,” our expressive neck/head animatronic
Sam is a seemingly complex animatronic with her fluid neck movements and reliable/solid mechanisms. However, with enough time, dedication, and resources, anyone is capable of building something similar.
Background
Sam was modeled after Kismet, a socially aware animatronic project built at MIT by Dr. Cynthia Breazeal. We designed Sam with similar facial attributes and expression range, albeit in a more human-like form. We were experimenting with an animatronic that could not only communicate verbally but also visually for maximum emotional conveyance. She can smile and laugh, roll her eyes, frown, and get mad—all by her facial expressions. This opened up possibilities to explore such as helping children with social awareness issues: i.e. individuals on the autism spectrum.
Mechanisms
Three-Axis Neck

The neck mechanism is based on a neck design by Custom Entertainment Solutions. This mechanism allows the head to have pitch and yaw movements and, most importantly, in its default resting position uses almost no power. The bottom servo allows the whole figure to spin with its bearing.
Lips, Mouth, and Jaw


The jaw pivots in the back and the servo mounted on the underside of the top faceplate controls the mechanism with a connecting rod. The servos on the ends of the lips move and down to create different mouth shapes also known as visemes. For example, the “AY” and “EE” sounds are created by moving the lips away from each other and the “OH” sound is created by moving them closer.
Eyes
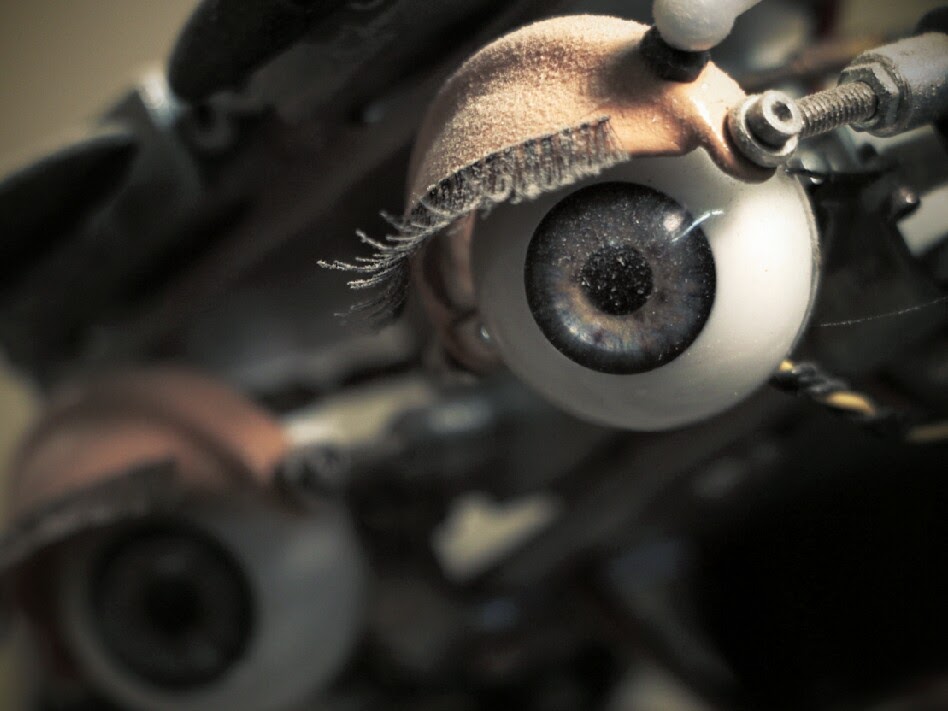
The plastic eyes were purchased from eBay by searching for “doll eyes.”
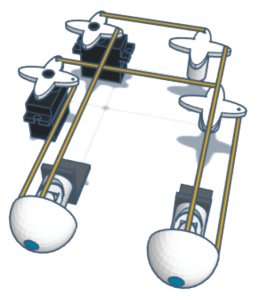
Both eyes are mounted and held in place with a u-joint with fish swivels that hook onto the eyeballs’ edges to control them. One servo pitches the eyes up and down and a second servo pivots the eyes left and right. To control both eyes simultaneously, a free-spinning servo horn is embedded in the face plate with a bearing to freely spin.
For the eyelids, we 3D printed out a design from Thingiverse and added a ball connector to the side. Each eyelid has one servo with a connecting rod that closes and opens the eyelid. The eyelids were important because it adds realism with blinking, squinting, giving Sam a tired look, or conversely, a surprised look.
The eyebrows are simply servos with 3D printed brows that spin. Those are the simplest parts of the entire figure yet require the most maintenance in terms of redefining limits due to loosening.
Hardware
Servo List
- 1x HS625MG @ $30 ea. — Neck spin (lowest servo on figure)
- 2x HS645MG @ $30 ea. — Neck pitch and yaw (the two that control the neck rods)
- 1x HS65MG @ $30 ea. — Jaw servo (can easily overheat if not careful)
- 10x HS65HB @ $22 ea. — Lips, eyebrows, eyelids, eye pitch, and eye spin
Servo Controller / Playback Unit
To control all fourteen of these servos at the same time, we’ve used several different controller boards. One of the first boards we used was the Lynxmotion SSC-32U ($45), a 32-channel servo controller that requires a USB connection to a PC. We’ve also used a ProCommander by Weigl coupled with a 16-channel DMX servo controller (SRV16) by Northlight Systems ($98), and a custom-made servo controller based on the PCA9685 LED driver, a Teensy 3.5 microcontroller ($27).
![]()